| Discos Duros |
 |
 |
 |
| EQUIPAMIENTO TECNOLÓGICO - Hardware | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Monday, 26 September 2005 15:22 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
There are no translations available. Aprende a instalarlo, a diferenciar un tipo de otro. Sabras que es IDE, ATA, SATA, PATA etc... DISCOS DUROS IDEINTRODUCCIÓN.
INTERFACES
INSTALACIÓN DE UN DISCO DURO.
TAREAS DE MANTENIMIENTO.
IntroducciónLa tecnología ATA (Advanced Technology Attachment), también conocida como IDE (Integrated Drive Electronics) es la más utilizada en los ordenadores personales debido a su bajo precio y sus razonables prestaciones. Los interfaces anteriores a ATA eran el ST506 (MFM/RLL) y SCSI (Small System Computer Interface). Con la aparición del IDE (Integrated Drive Electronics) el interface ST506 quedó obsoleto y el SCSI ha evolucionado hasta nuestros días para convertirse en una interfaz más orientada al sector profesional o a los equipos servidores. El precursor de ATA (Advanced Technology Attachment) creado por IBM en 1984 fue PCAT (PC Attached Technology) cuyo primer fabricante de chips fue Western Digital. InterfacesEn esta sección abordaremos los diferentes tipos de conexiones de los discos duros IDE ATA: los cables de datos, sus conectores y la alimentación de las unidades de disco (cables, conexiones y tensiones asociadas a cada pin). Cables de datos: PATA y SATAEn la última revisión del interfaz ATA paralelo se utiliza un cable plano de 80 hilos en los que tenemos 16 líneas dedicadas a control y 16 dedicadas a la transmisión de datos. Sin embargo el SATA utiliza un cable con un número mínimo de hilos y una longitud máxima de 1 metro. Por tanto tenemos unos cables más finos y más largos con lo que se puede mejorar la ventilación y posición de los componentes de nuestro PC. Cable IDE Paralelo de 80 hilosLos conectores HOST, MASTER, SLAVE se pueden distinguir fácilmente por sus colores. El conector azul debe ir en la placa base, el negro conectarse al dispositivo maestro y el gris al dispositivo esclavo. Aunque parezca que son intercambiables (hilos en paralelo), esto no es así. De hecho, el conector gris (SLAVE) no tiene conexión en el pin (28) CSEL con los otros dos conectores y estos están unidos a través de la placa base a la masa del ordenador (0 V). Incluso, en algunos cables se puede observar que está cortado (falta una parte) o si desmontamos el conector como en la figura de abajo, podemos observar cómo no está conectado al cable que proviene del host.
Cable IDE SATA.En cuanto al cableado de datos SATA podemos destacar la finura y manejabilidad con respecto de los anteriores. Otras diferencias, diríamos más importantes son: Cada cable tiene sólo dos conectores lo que implica que la conexión con el host (placa base) es punto a punto, esto facilita enormemente la configuración de los dispositivos IDE.
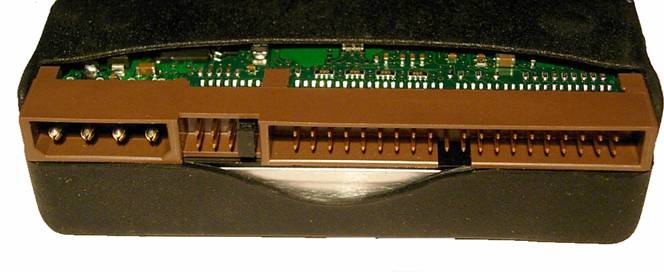
Cables de alimentación y conectores de alimentación: PATA y SATA.Aunque existe una especificación del conector de alimentación con 5V, 12V y 3.3V del Serial ATA, muchos de los equipos existentes en el mercado no tienen conectores de alimentación de este tipo. Debido a esto, una gran mayoría de discos duros contienen ambos tipos de conectores conectores: el SATA con 15 pines y el estándar PATA con 4. En cualquier caso cabe destacar que no se deben utilizar los dos conectores a la vez (aunque existan y tengamos conectores o conversores).
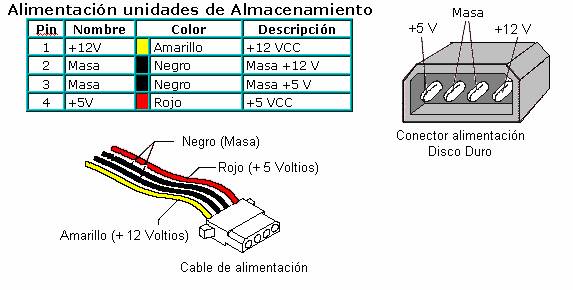
En las siguientes figuras mostramos las tensiones y conectores utilizados en los discos duros PATA.
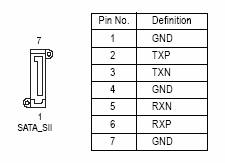
A continuación se muestran el esquema de conexionado de un conector de alimentación SATA y el significado de cada uno de sus pines.
Instalación de un disco duroPreparación y consideraciones a tener en cuenta.1.- Selección del disco duro y lectura del manual del disco a adquirir.Aunque confiamos en los profesionales que nos han aconsejado un determinado dispositivo no estaría de más leer la documentación del fabricante (guías de instalación rápida, manuales de uso, etc) que generalmente está disponible en Internet. 2.- Recogida del material.En la empresa donde realizamos la compra debemos observar, al menos, que el material es tratado con sumo cuidado: evitando pequeños/grandes golpes en mostradores, entregando el material dentro de su bolsa o caja antiestática, sujetándolo de la parte metálica para no hacer presiones innecesarias sobre el circuito impreso del disco, etc. 3.- Manejo del disco duro.Se pueden aplicar los anteriores procedimientos (no vamos a ser menos). Si el material viene envasado (con su bolsa contra la humedad) no debemos abrirla hasta que alcance la temperatura ambiente (si estaba en un almacén de la empresa) de esta forma evitaremos condensaciones de vapor de agua en el disco duro. Procuraremos descargarnos de electricidad estática tocando cualquier parte sin pintura de la caja del PC aunque se pueden adquirir elementos que la evitan (sillas con una pequeña tira metálica que toca el suelo, muñequeras que se conectan a cualquier parte metálica con toma de tierra, etc.) y por supuesto, cuando eliminemos la protección (la bolsa) evitaremos a toda costa tocar cualquier elemento electrónico con las manos (jumpers incluidos) por lo que utilizaremos herramientas (pinzas, destornillador, etc.) aisladas eléctricamente. 4.- Montaje.Revisar el procedimiento de montaje y configuración descrito en el manual del disco. El ordenador personal debe estar desconectado totalmente de cualquier otro aparato eléctrico así como de la corriente eléctrica. Estudiar la configuración del disco duro (cables, jumpers), así como la posible variación de la misma de otras unidades de almacenamiento (discos duros, CD/DVD, etc.) e incluso la bahía donde instalarlo. En la instalación destacan varios puntos que no se suelen tener muy en cuenta: Mantener limpia la zona de trabajo (tornillos, etc.). Los tornillos que sujetan el disco duro a la caja del PC (los estándar de PC suelen valer). Debemos observar con detenimiento su longitud puesto que si es demasiada puede dañar el disco cuando apretemos los mismos (roturas de PCB o cortocircuitos). La posición del disco duro. Los discos duros no se pueden colocar de cualquier forma, en general pueden estar colocados de horizontal o verticalmente pero nunca inclinados. Incluso, algunas de las posiciones horizontales o verticales pueden estar desaconsejadas o prohibidas. La separación de otros componentes. Los discos deben estar separados de otros componentes lo máximo posible para mejorar la ventilación de los mismos. Evidentemente el disco al conectarlo a la corriente eléctrica debe estar situado en posición y atornillado. No debemos hacer malabarismos con el mismo (situado sin atornillar, encima de la caja del PC, etc.). La calidad y la potencia de la fuente de alimentación. Tengamos en cuenta que los dispositivos de almacenamiento tienen un pico de consumo en el arranque de la máquina lo que puede provocar que en ocasiones no inicie la máquina (fallos aleatorios) si sobrepasamos la potencia de la misma. Otro valor a tener en cuenta es la calidad de la señal entregada ya que los valores típicos de muchos discos duros (tolerancia a variaciones de tensión) suele ser para la tensión de 5 voltios un 5% [4,75 V - 5,25 V] y para el valor de 12 V de un 10 % [10,8 V - 13,2 V] por lo que una tensión entregada de forma deficiente puede causar la pérdida de datos o un funcionamiento anormal del PC. Instalación.Instalación de un disco duro IDE PATA. El proceso de instalación de un disco duro puede ser bastante desastroso si no se toman las medidas oportunas (revisión de la sección anterior). Las fases en las que podríamos dividir la instalación serían: Configuración del dispositivo.Debemos tener en cuenta las siguientes reglas: Si estamos instalando un disco duro con interfaz paralela ATA debemos conocer los siguientes términos: Interfaz IDE Primario/Secundario: Nombramos así a los dos conectores de la placa base en los cuales podemos alojar dos dispositivos que llamaremos Maestro/Esclavo: Cualquier dispositivo IDE PATA puede ser tanto Maestro como esclavo. Para que sea uno o el otro deberemos configurarlo apropiadamente (selección a través de jumpers y utilizando los conectores del cable PATA adecuados). Hay que destacar que los dispositivos maestro y esclavo son mutuamente excluyentes en el interfaz, es decir, sólo puede haber un maestro y un esclavo o cualquiera de ellos. Selección del tipo de dispositivo: Maestro/esclavoPara una correcta selección debemos seleccionar los jumpers de configuración de forma adecuada. Para saber la disposición de los mismos debemos seguir el manual de instalación del disco duro o buscar en el propio disco duro una serigrafía que la indique. Los discos duros suelen tener los siguientes tipos de posibles configuraciones: i) Como Maestro de la interfaz al que lo conectamos. ii) Como Esclavo de la interfaz al que lo conectamos. iii) Como Maestro con esclavo de la unidad al que lo conectamos (no es muy habitual y presupone que tenemos un dispositivo IDE Esclavo conectado al mismo cable) iv) Con Cable Select habilitado (permite que el disco duro se identifique según el conector utilizado (negro = Maestro y gris = Esclavo). ESTA ES LA MEJOR OPCIÓN CON DIFERENCIA. Ejemplo 1. Nos piden instalar un disco duro IDE ST340810A en un PC como dispositivo Maestro del Interfaz primario. a) Buscamos el manual de la unidad y comprobamos la colocación de los jumpers.
Master or single drive O la opción recomendada Cable Select Si seleccionamos Cable Select deberemos utilizar el conector Negro. Ejemplo 2. Nos piden instalar un disco duro IDE ST340810A en un PC como dispositivo Esclavo del Interfaz primario. a) Buscamos el manual de la unidad y comprobamos la colocación de los jumpers.
Drive is slave O la opción recomendada Cable Select Si seleccionamos Cable Select deberemos utilizar el conector Gris. Instalación de un disco duro IDE PATA. Si estamos instalando discos duros con interfaz Serial ATA simplemente deberemos colocarlos en la bahía prevista y conectarle los cables de alimentación y datos. No hay más configuración que realizar (hay que tener en cuenta que los discos SATA no son maestros o esclavos). Una de las reglas a seguir es que no se deben utilizar los dos conectores de alimentación de forma simultánea. Tareas de mantenimientoUtilización de la tecnología S.M.A.R.T (Self Monitoring Analysis and Reporting Technology).S.M.A.R.T. Permite a los PCs predecir un posible fallo de los dispositivos de almacenamieto. Pero, ¿cómo puede llegar a predecir el futuro?. Fundamentalmente porque los discos duros contienen componentes mecánicos y electrónicos que sufren una degradación con el uso. Por ejemplo, el motor eléctrico de una unidad de disco duro, cuando es conectado a la corriente eléctica, tarda un tiempo en iniciarse (spin-up) y consume una determinada potencia. Todos estos parámetros son recogidos por sensores y como el fabricante conoce los factores típicos (así cómo sus valores límite) puede obtenerse una estadística que permita valorar la posibilidad de fallo cuando se detectan situaciones anómalas de forma repetida. ¿Qué parámetros se toman en consideración de forma habitual?
La mayoría de fabricantes de discos duros utiliza SMART (unos con más sensores otros con menos) y algoritmos especiales para poder detectar unidades defectuosas con sus programas de verificación de los discos. Las herramientas más comunes las podemos encontrar en las siguientes URLs:
S.M.A.R.T. bajo Debian GNU/LinuxEl paquete smartmontools contiene dos programas (smartctl y smartd) para controlar y monitorizar sistemas de almacenamiento utilizando SMART (incluido en la mayoría de discos ATA). En muchos casos, estas utilidades preveerán la degradación o los fallos de los discos y avisarán de forma adecuada. InstalaciónLa última versión del paquete en formato .deb esta disponible en la página Debian smartmontool packages (http://packages.debian.org/smartmontool). Este paquete está disponible actualmente en versión testing, unstable y experimental. La instalación como siempre es muy sencilla. Simplemente como root o con los derechos adecuados debes ejecutar los siguientes comandos: # apt-get update && apt-get install smartmontools que descargará e instalará de forma automatizada el paquete. Configuración Después de haber instalado smartmontools puedes leer los manuales: # man smartd.conf # man smartctl # man smartd y los ficheros que encontrarás en /usr/share/doc/smartmontools. Modificación del fichero /etc/smartd.conf En ausencia de este fichero smard intentará abrir todos los dispositivos IDE y SCSI. Por tanto, para evitar posibles problemas o logs innecesarios cambiará la configuración por defecto del mismo: # vi /etc/smartd.conf Comienza con la línea DEVICESCAN, si esta existe, las restantes lineas de configuración, esten comentadas o no serán ignoradas. Se le pueden añadir directivas a esta línea que serán aplicadas a todos los dispositivos encotrados en el escaneo. En el caso particular de que no añadireamos directivas, para los discos duros ATA se aplicaría la de monitorizar todas las propiedades SMART del dispositivo (-a). Directivas -d TYPE ata para discos ATA(PATA/SATA) scsi para discos SCSI -o VALUE Habilita o deshabilita el testeo automático fuera de línea cuando se inicia smard y no tiene posteriores efectos. Los valores típicos son on y off. El intervalo entre test es específico del fabricante pero suele ser de cuatro horas. -S VALUE Habilita o deshabilita el atributo de autosalvado cuando inicia smard y no tiene posteriores efectos. Los valores válidos son on y off. -H Comprueba el estado de salud del disco (SMART). Si cualquier atributo de prefallo es menor o igual al valor de disparo quier indicar una predicción de fallo en menos de 24 horas y que se generará un mensaje en syslog ´LOG_CRITICAL´. -l TYPE Informa de incrementos en el numero de errores en uno dos SMART logs. Las opciones válidas de esta directiva son: error informa si el número de errores ATA se ha incrementado desde la última comprobación. selftest - informa si el numero de test fallidos se ha incrementado desde la última comprobación. -s REGEXP Ejecutar auto comprobaciones o test fuera de linea inmediatamente o de manera programada. Los test se ejecutarán al final del intervalo especificado por la cadena de 12 caracteres T/MM/DD/d/HH. Donde: T tipo de test. ´L´ auto comprobación larga o ´S´ para corta, ´C´ para conveniente (sólo en dispositivos ATA), y ´O´ para tests fuera de linea inmediatos (sólo para dispositivos ATA). MM es el mes del año especificado con dos dígitos decimales. DD es el día del mes expresado con dos dígitos decimales. d es el día de la semana expresado con un dígito decimal (1 Lunes hasta 7 Domingo). HH es la hora del dia expresado con dos dígitos decimales a partir de las 00 horas (medianoche) hasta las 23 horas. NOTA: Los tests no se ejecutarán si se esta ejecutando otro cualquiera. Un ejemplo sería: Ejecutar un test en la hora de la comida (2 p.m.) todos los días de la semana excepto los domingos. -s L/../../(1|2|3|4|5|6)/14 Ejecución de smartctl Aquí hay varios ejemplos de uso de smartctl # smartctl -h # smartctl -V # smartctl -a /dev/hda # smartctl -t conveyance /dev/hda # smartctl -i /dev/hda Muestra información sobre el hd. |







 Como el disco duro a instalar va a ser Maestro (sin ningún esclavo) podremos seleccionar:
Como el disco duro a instalar va a ser Maestro (sin ningún esclavo) podremos seleccionar: Como el disco duro a instalar va a ser Esclavo (sin ningún esclavo) podemos seleccionar:
Como el disco duro a instalar va a ser Esclavo (sin ningún esclavo) podemos seleccionar: