| MONOGRÁFICO: ROBOT-BICHOS - ROBOT-BICHOS ANALÓGICOS |
 |
 |
 |
| CAJON DE SASTRE - Cajon de sastre | |||||||
| Escrito por Leopoldo Mosquera Taboada | |||||||
| Venres, 02 Maio 2008 00:00 | |||||||
Páxina 3 de 5
ROBOT-BICHOS ANALÓGICOS Ia) Introducción:En el artículo anterior, ya comenté que una forma alternativa y muy económica de acercar a los alumnos hacia la robótica es construyendo un artefacto móvil de reducidas dimensiones y que se apoya directamente sobre los ejes de sus motores (previamente forrados con la funda de plástico de un cable eléctrico grueso) para desplazarse. Ahora la propuesta consistirá en lograr que los robot-bichos puedan funcionar de un modo autónomo modificando la dirección de giro de sus motores ante la presencia de luz, humedad o contacto en su entorno próximo; utilizando una linterna, una línea de agua o la presión de los dedos, podremos forzar su rastreo.
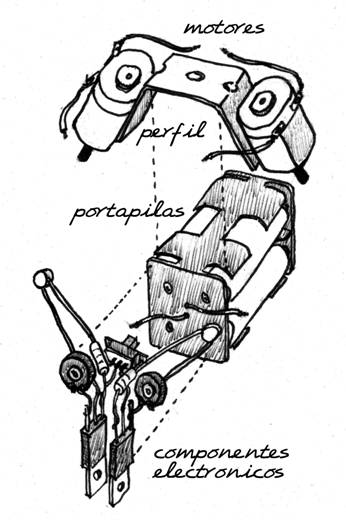
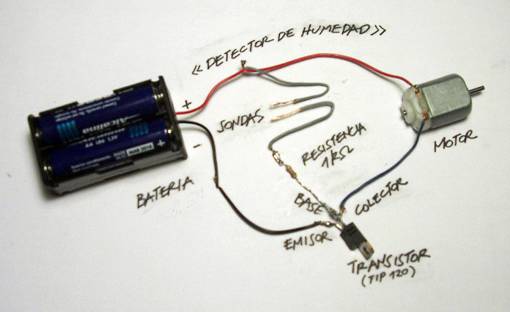
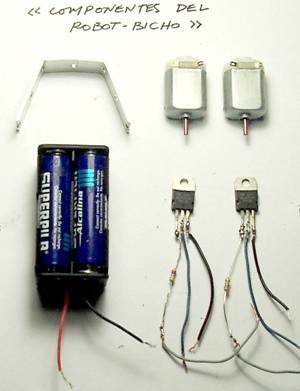
Para la construcción de los robot-bichos analógicos bastará con disponer de dos motores con caras planas, un trozo de perfil plano perforado de aluminio y de uno o dos portapilas pegados, según los casos. La incorporación sobre el portapilas “motorizado” de unos pocos dispositivos electrónicos (transistores, resistencias o condensadores) dotarán al insectoide de una sensibilidad acusada a variables físicas externas. Su aspecto queda definido por la inspiración que nos proporcionan los insectos terrestres: el portapilas hace de abdomen, los motores de tórax, los transistores de mandíbulas y los condensadoreses o las resistencias de antenas. b) robot-bicho hidrófiloEn este modelo se utiliza un circuito sensible a la humedad (por duplicado), también muy fácil de montar y de entender, ya que para aprovechar de un modo práctico la conductividad eléctrica del agua, bastan un transistor y una resistencia como componentes electrónicos. Como puede observarse en la foto del circuito, las denominadas sondas están compuestas por dos cables finos pelados (a modo de escobillas) que se situarán con una separación de apenas 1 mm, de modo que cuando una gota de agua caiga entre ambos, se cerrará el circuito interior que une la batería (con tensión 6 V) y la base del transistor. Una débil corriente circulará por la gota de una escobilla a otra y, en este caso, se necesita intercalar una resistencia de 1 KOhm para proteger la base, evitando la destrucción del transistor en el caso de que los cables se tocaran accidentalmente.
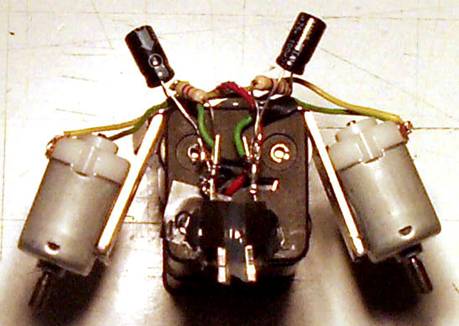
Como el transistor elegido TIP 120 contiene un montaje Darlington, la sensibilidad de este detector de humedad es lo suficientemente grande para que se cree una corriente en el colector que recorra el circuito eléctrico principal que une batería y motor, haciendo que éste se active; el transistor se podría decir que funciona como un interruptor activado por agua que cierra el circuito exterior. A cada motor le corresponderá un circuito con su transistor y sus sondas, y ambos circuitos se conectarán después en paralelo compartiendo la batería; los componentes de uno y otro circuito se ubicarán sobre el portapilas dispuestos simétricamente. En las imágenes se observan las posibles etapas para la construcción este modelo, empezando por pelar seis cables de unos 5 cm de largo (a los que después se ajustará la longitud una vez se sitúen sobre el portapilas) pareados según tres colores. La resistencia de protección de la base (a la que conviene no recortar sus patillas, pues luego se convertirán en las antenas) se suelda en el extremo de la patilla izquierda del transistor, por un lado, y por otro a uno de los cables que formará la sonda; en la patilla central (colector) se soldará un cable que se conectará a uno de los bornes del motor y en la patilla derecha (emisor) se soldará un cable (mejor de color negro) que se unirá con el cable negro (polo negativo) que sale del portapilas.
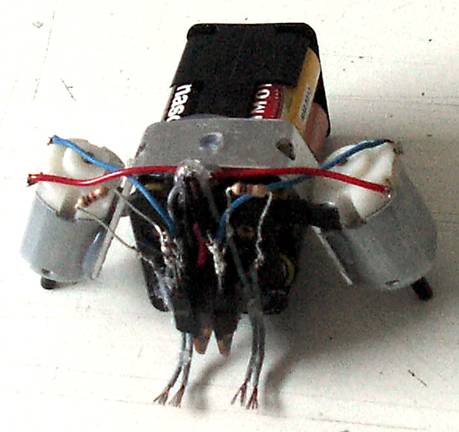
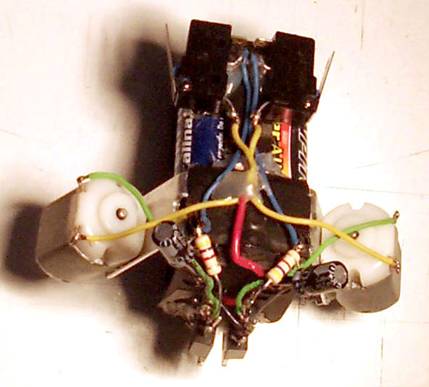
El siguiente paso consiste en pegar todos los elementos sobre el portapilas de 6V. Con la pistola de termofusible caliente, adherimos el perfil en uno de los extremos del portapilas, a continuación, una vez la unión anterior se haya enfriado, pegamos los motores cuidando que sus ejes (en los que insertaremos a presión una funda de cable eléctrico) sobresalgan lo suficiente para que el portapilas roce lo menos posible sobre una superficie horizontal. Después pasamos a pegar los transistores (con las patillas hacia arriba, colocados de canto y con sus dorsos enfrentados) en el centro de la cara frontal del portapilas y con cuidado de que sobresalgan, pero sin llegar a rozar con la superficie horizontal.
Superada la etapa anterior, es el momento de conectar y soldar los distintos componentes, comenzando por los cables que van unidos al polo positivo de la pila (cable rojo): dos que saldrían hacia uno de los bornes de cada motor y otros dos que harán de sondas, situándose pegados al portapilas al lado de cada uno de los transistores; el punto común a todos los cables anteriores conviene pegarlos sobre la parte superior del portapilas, recubriéndolos de pegamento para aislarlos eléctricamente del perfil de aluminio y de otros posibles contactos. Lo siguientes cables en conectar son aquellos que partían del emisor de cada transistor y que van a masa, es decir, que se unen con el cable negro correspondiente al polo negativo de la batería. Por último, se soldarán los cables que partiendo de cada colector se dirigen al borne que ha quedado libre en su respectivo motor. El robot-bicho ya estaría terminado a falta de darle algunos toques finales, como pegar en paralelo a cada uno de los cable de sonda situado al lado de los transistores, el cable soldado a la patilla de cada resistencia (antenas). Ambos pares de cables se pelarán unos 5 mm, se abrirán sus hilos de cobre y se doblarán para apoyar sobre el plano en el que se sitúe el insectoide, separándose entre sí lo justo para evitar el contacto directo.
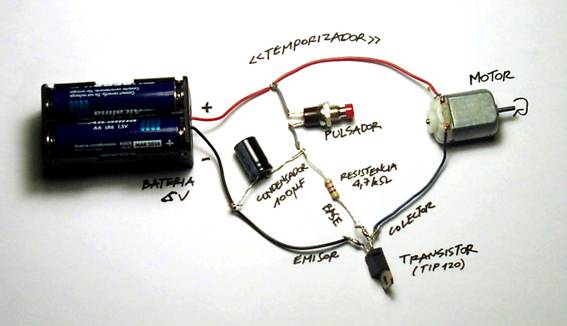
Para observar su funcionamiento debemos buscar una superficie lisa e impermeable, sirviéndonos de un inyector de plástico de 5 ml (o similar) para impulsar una gota de agua sobre las escobillas de la sonda y lograr la activación de uno o dos motores, lo que provoca el desplazamiento durante unos segundos del bichoide; si se crean una serie de manchas de agua sobre la superficie, podemos lograr que el movimiento sea más prolongado en el tiempo, si bien totalmente descontrolado. c) robot-bicho capacitivoSi en el ejemplo anterior sustituimos las sondas por un pulsador, bastará presionarlo para que el motor se accione y nuestro robot-bicho se ponga en marcha, aunque sólo sea para iniciar un giro; el problema es que apenas avanzará, ya que al distanciarse de nuestras manos dejaremos de pulsar para cerrar el circuito que proporciona corriente a la base del transistor. La manera de conseguir un movimiento continuado, al menos durante algunos segundos, podría lograrse incorporando un condensador al circuito.
En la imagen se sitúa este tercer elemento en el circuito interno del esquema eléctrico, conectado en un extremo (el indicado en el condensador como de polaridad negativa) al cable negro del portapilas, y en el otro extremo al nodo resistencia-pulsador. Lo que sucederá en esta nueva disposición es que al presionar el pulsador, el condensador se llenará casi instantáneamente de carga eléctrica, y cuando se abra la conexión del pulsador, dicha carga se moverá en dirección hacia la base, permitiendo en paso de la corriente de la pila del colector al emisor y permitiendo el movimiento del motor durante algunos segundos. Los valores de condensador y resistencia, de los que depende el denominado tiempo de descarga (que estimo en casi 3 segundos), los he escogido más bien por razones de influencia en el aspecto del robot-bicho, ya que un condensador de mayor tamaño no se percibía como una antena y la resistencia era la de mayor grosor que disponía en el momento del montaje. Queda abierta la posibilidad de experimentar con otras combinaciones o de mejorar los resultados intercalando, por ejemplo, un potenciómetro (que haría de ojo) en paralelo con el condensador. A la batería de 6 V se conectan en paralelo los dos circuitos temporizadores cuyos elementos electrónicos (transistor, resistencia y condensador) deberán ser soldados antes de incoporarse sobre el portapilas. Por otro lado se preparía el cableado que sale de los motores y de los pulsadores; éstos son del tipo fin de carrera ya que se pegan mejor en sus caras laterales, y así dispuestos también se presionan más cómodamente de modo individual (para provocar giros) o al unísono (para el avance recto).
En la patilla de los emisores se soldará un cable negro de 2 cm que se unirá después con el que sale del portapilas del mismo color (polo negativo) y también la patilla metálica (que conviene no recortar) del negativo de cada condensador correspondiente. En los colectores se conectará un cable de 5 cm que irá directamente a uno de los bornes del motor y finalmente en las bases se soldará uno de los extremos de la respectiva resistencia de descarga; el otro extremo de éstas, con longitud de 4 mm, se soldará con la patilla recortada por la mitad del polo positivo del condensador.
A continuación se debe preparar el cableado que sale de los finales de carrera: en los bornes NO se soldará un cable de casi 6 cm que será el que enlace con el nodo resistencia-condensador, y de los bornes COM partirá un cable de 7 cm que irá directamente al contacto libre del motor correspondiente, dejando pelado 5 mm el recubrimiento plástico en algún punto intermedio de su trayectoria, donde se conectará con el polo positivo de la pila (cable rojo).
Preparadas ambas partes del circuito temporizador, procederemos a pegar los transitores en la cara frontal del portapilas y los pulsadores su parte superior trasera, donde sean accesibles. Para terminar el robot-bicho bastará con conectar los cables que van a los bornes de los motores, los correspondientes a cada nodo antes comentados, así como los que al unirse a los polos de la batería, permiten configurar un esquema de dos circuitos en paralelo. Al probar su funcionamiento tendremos la sensación de que es un insectoide que intentásemos atrapar y que siempre se aleja unos centímetros de nuestra mano. d) Conclusión:Con escasos conocimientos de electrónica y unos pocos componentes, los alumnos podrán desarrollar un proyecto de robot-bicho que explica en su funcionamiento experimentos científicos elementales como la conductividad del agua o las posibilidades de almacenamiento de pequeñas cantidades de energía eléctrica. |