|
Sensores de Contacto
Se
emplean para detectar el final del recorrido o la posición límite
de componentes mecánicos. Por ejemplo: saber cuando una puerta
o una ventana que se abren automáticamente están ya completamente
abiertas y por lo tanto el motor que las acciona debe pararse.
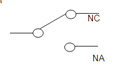
Los principales son los llamados fines
de carrera (o finales de carrera). Se trata de un interruptor
que consta de una pequeña pieza móvil y de una pieza fija que
se llama NA, normalmente abierto, o NC, normalmente cerrado.
|
Pincha
en la imagen para ver el vídeo de un robot con sensores de proximidad
en su parte superior y con sensores de contacto en su parachoques
inferior
Fuente del vídeo: www.youtube.com/watch?v=VqhViFcw_7I |
|
La
pieza NA está separada de la móvil y sólo hace contacto cuando
el componente mecánico llega al final de su recorrido y acciona
la pieza móvil haciendo que pase la corriente por el circuito
de control.
La pieza NC
hace contacto con la móvil y sólo se separa cuando el componente
mecánico llega al final de su recorrido y acciona la pieza móvil
impidiendo el paso de la corriente por el circuito de control.
Según el tipo de fin de carrera, puede haber una pieza NA, una
NC o ambas.
|